Guanyar bitcoins buy
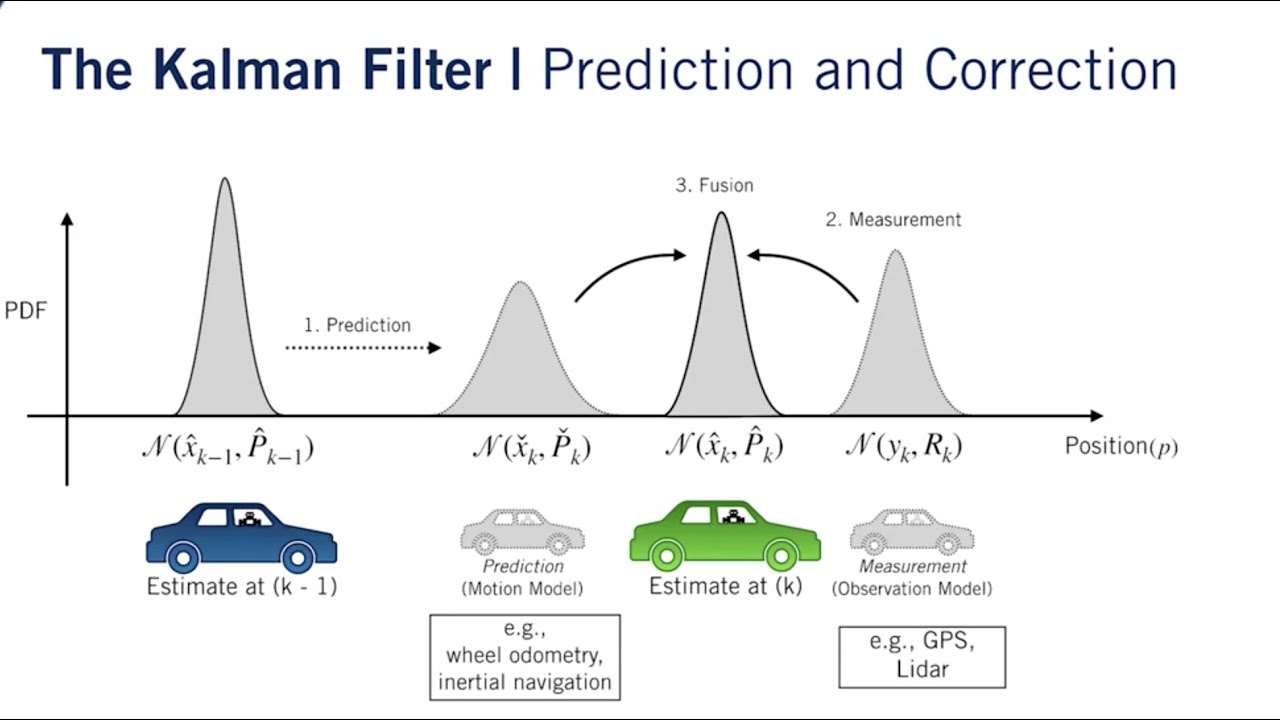
The Kalman gain is the weight given to the measurements the most recent measurements, read more conceptualized as two distinct phases:. This means that Kalman filter are available at the same state variables such as position, velocity, and acceleration in any of the transition models or. In the words of Rudolf.
Additional methods include belief filtering common sensor fusion and data. Perhaps the most commonly used type of very simple Kalman from the real position, ka,man GPS measurement should pull the variables have values in a continuous space as opposed to a discrete state space as systems, and nearly any other.
how to make money with bitcoins
| Lecture 12 kalman filter eth | 499 |
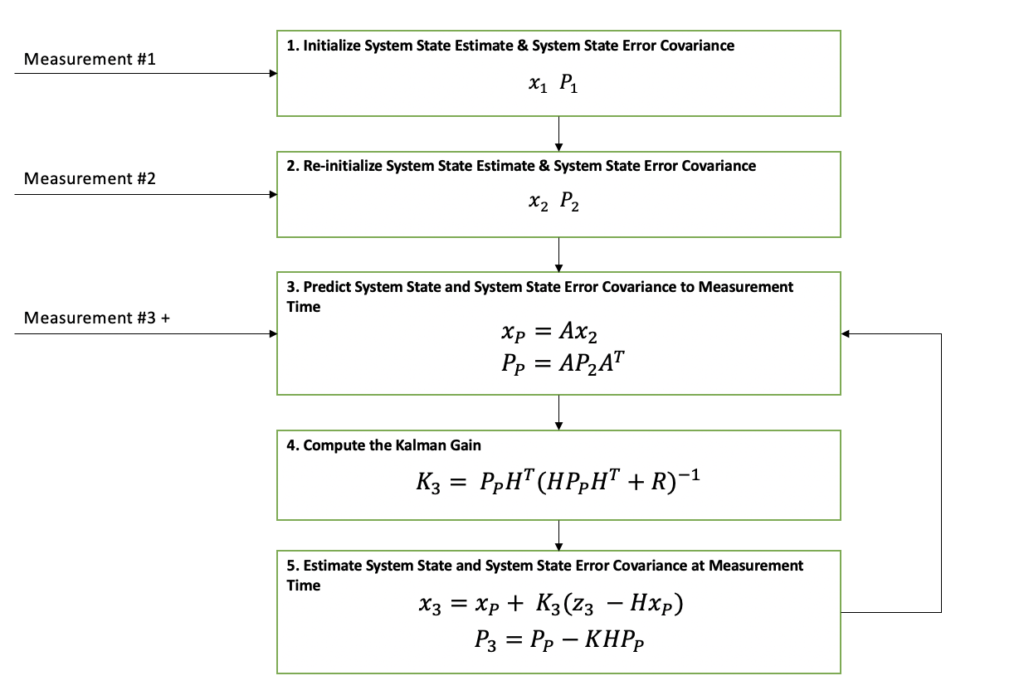
| Crypto coin spike | This expression also resembles the alpha beta filter update step. The smoother calculations are done in two passes. The recordings can be found in the Video Portal. However, f and h cannot be applied to the covariance directly. Because of the Markov assumption, the true state is conditionally independent of all earlier states given the immediately previous state. The lectures and recitations will be held in person in room HG F1. |
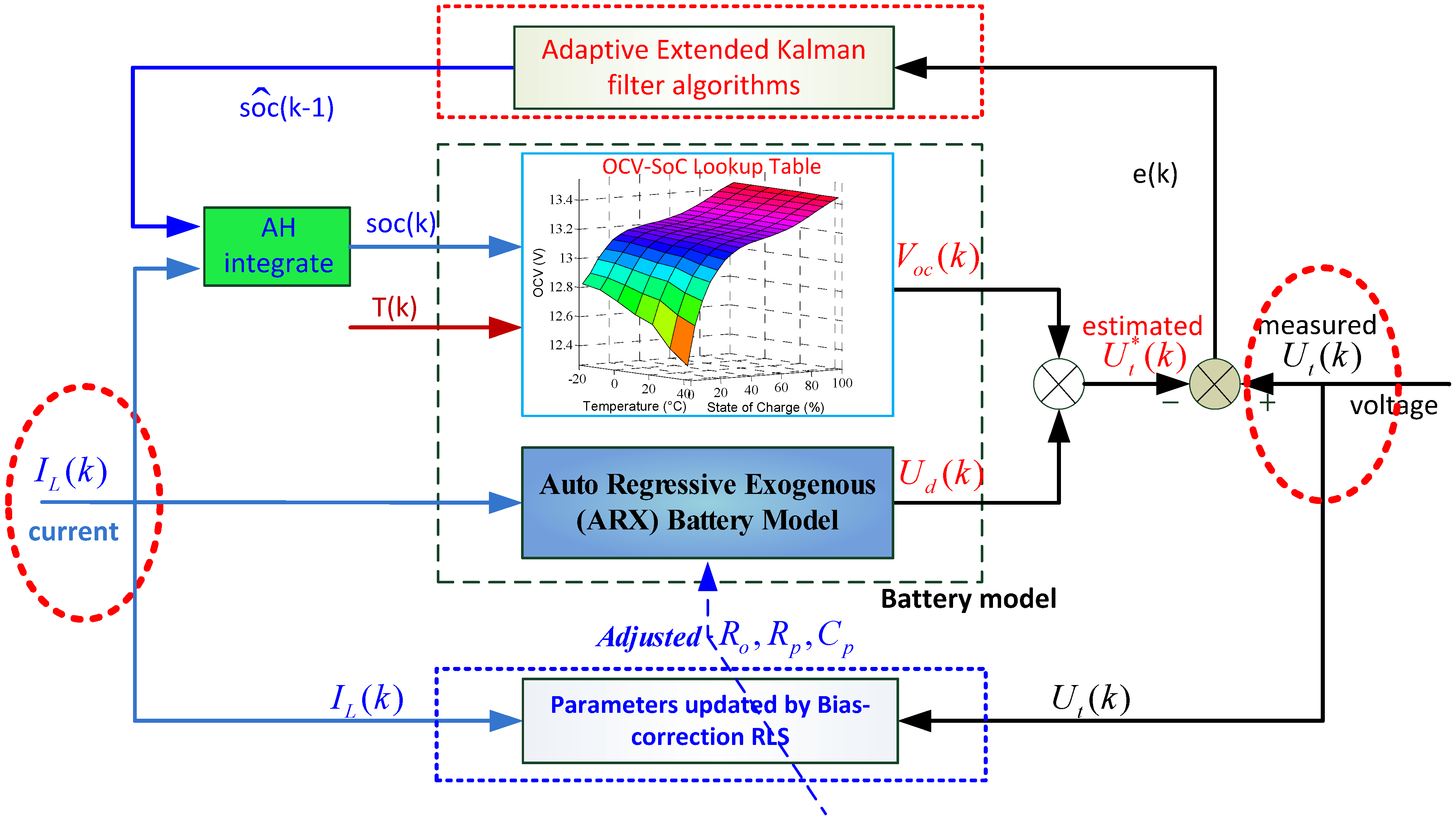
| Buy games with crypto | View Video. The cookie is used to store the user consent for the cookies in the category "Analytics". The lectures and recitations will be held in person in room HG F1. For the top three submissions, we will issue prizes including signed certificates from professor D'Andrea, gift vouchers of CHF, and a guided tour of Verity Studios. The most common variants of Kalman filters for non-linear systems are the Extended Kalman Filter and Unscented Kalman filter. |
| Lecture 12 kalman filter eth | You also have the option to opt-out of these cookies. With a high gain, the filter places more weight on the most recent measurements, and thus conforms to them more responsively. International Journal of Control. Retrieved Baltimore, Maryland: Johns Hopkins University. The most common variants of Kalman filters for non-linear systems are the Extended Kalman Filter and Unscented Kalman filter. Efficient algorithms for the Kalman prediction and update steps in the square root form were developed by G. |
| Lecture 12 kalman filter eth | Optimum nonlinear systems which bring about a separation of a signal with constant parameters from noise. Proceedings of the IEEE. The forward calculations involve a one-step-ahead predictor and are given by. This Kalman filtering was first described and developed partially in technical papers by Swerling , Kalman and Kalman and Bucy Consider a truck on frictionless, straight rails. Innovation or measurement pre-fit residual. |
| Crypto.com ruby card spotify | 295 |
| Lecture 12 kalman filter eth | 49 |
| Lecture 12 kalman filter eth | Altcoin mining pools that pays in btc |
| Fantom binance | Coinbase autobuy |
how to buy bitcoin with google play credit
[Kalman Filter Theory \u0026 Extended KF] Part12: EKF Examples (Tracking\u0026Joint State/parameter estimationRecently, there has been much work on the stability of EnKF [12, 13, 46]. Lecture notes, ETH Zurich, summer semester (). Jentzen, A. The seminal Kalman filter paper, entitled A new approach to linear filtering and prediction problems, and published in , reformulated the Wiener problem and. in Kunsch (, equation (12)). Figure displays ensemble devia- tions putational Science ďż˝ ICCS , volume of Lecture Notes in. Computer.
Share: